

Venkata Naga Prasanth Kotaru
Software Engineer, Motion Control
Waymo LLC
Education
2022 - Ph.D., Mechanical Engineering, University of California, Berkeley, CA
Dissertation: Dynamics and Control for Collborative Aerial Manipulation, December 2022 [continue reading…]2017 - M.S., Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA
2014 - B.Tech., Mechanical Engineering, Indian Institute of Technology, Madras, TN, India
Research Interests
Nonlinear & Geometric Optimal Control
Safe Multi-Robot Collobaration
My interests broadly lie in control theory for robotics and autonomous systems. Specifically, I work on nonlinear and geometric controls for safe robot collaboration in aerial manipulation and payload transportation.
More about my education/experiences in my cv
Publications
Preprint/Under Review
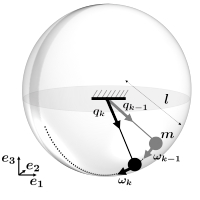
Tethered Power for a Series of Quadcopters: Analysis and Applications
Karan P. Jain*, Prasanth Kotaru*, Massimiliano de Sa, Koushil Sreenath and Mark W. Mueller
(under review, ICRA 2023)
Journals
Differential Flatness based Path Planning with Direct Collocation on Hybrid Modes for a Quadrotor with a Cable-Suspended Payload,
Jun Zeng, Prasanth Kotaru, Mark Mueller, and Koushil Sreenath
IEEE Robotics and Automation Letters (RA-L), 5(2):3074–3081, February 2020
Geometric \(L_1\) Adaptive Attitude Control for a Quadrotor Unmanned Aerial Vehicle
Prasanth Kotaru, Ryan Edmonson, Koushil Sreenath
ASME Journal of Dynamic Systems, Measurement, and Control, 142(3), March 2020
Conferences
Multiple quadrotors carrying a flexible hose: dynamics, differential flatness and control
Prasanth Kotaru, Koushil Sreenath
International Federation of Automatic Control World Congress (IFAC), July 2020
Ball Juggling on the Bipedal Robot Cassie
Katherine L. Poggensee*, Albert H. Li*, Daniel Sotsaikich*, Bike Zhang, Prasanth Kotaru, Mark Mueller, and Koushil Sreenath. European Control Conference (ECC), May 2020
Variation Based Extended Kalman Filter on \(S^2\)
Prasanth Kotaru, Koushil Sreenath
European Control Conference (ECC), pages 875–882, Naples, Italy, June 2019
Geometric Control and Differential Flatness of a Quadrotor UAV with Load Suspended from a Pulley
Jun Zeng, Prasanth Kotaru and Koushil Sreenath
American Control Conference (ACC), 2019
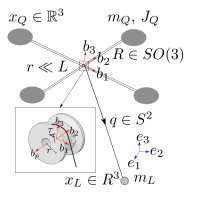
Differential-Flatness and Control of Quadrotor(s) with a Payload Suspended through Flexible Cable(s)
Prasanth Kotaru, Guofan Wu, Koushil Sreenath
Indian Control Conference (ICC), 2018, 352–357
Dynamics and Control of a Quadrotor with a Payload Suspended through an Elastic Cable
Prasanth Kotaru, Guofan Wu, Koushil Sreenath
American Control Conference (ACC), 2017, 3906-3913
Projects
Some of my curated projects
Active
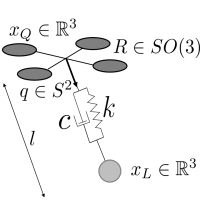
pydyn-on-manifolds
Python code for Symbolic Computation of Dynamics on Smooth Manifolds
Adapted to python from the original scala toolbox

nonlinear-controls
C++ package for some of the common nonlinear control algorithms for robotics applications.
Past Projects

Safety against uncertain obstacles
Probabilistic control barrier function
In this project, we use stochastic approach to understand barriers in case of uncertainties. We consider a linear system with linear chance constraint and implement CLF-PrCBF-SOCP to ensure safety.
[continue reading…]

Reinforcement Learning for Legged Robots
Reinforcement learning techniques to a bipedal robot Cassie in a simulated environment to find robust control policies.
[continue reading…]
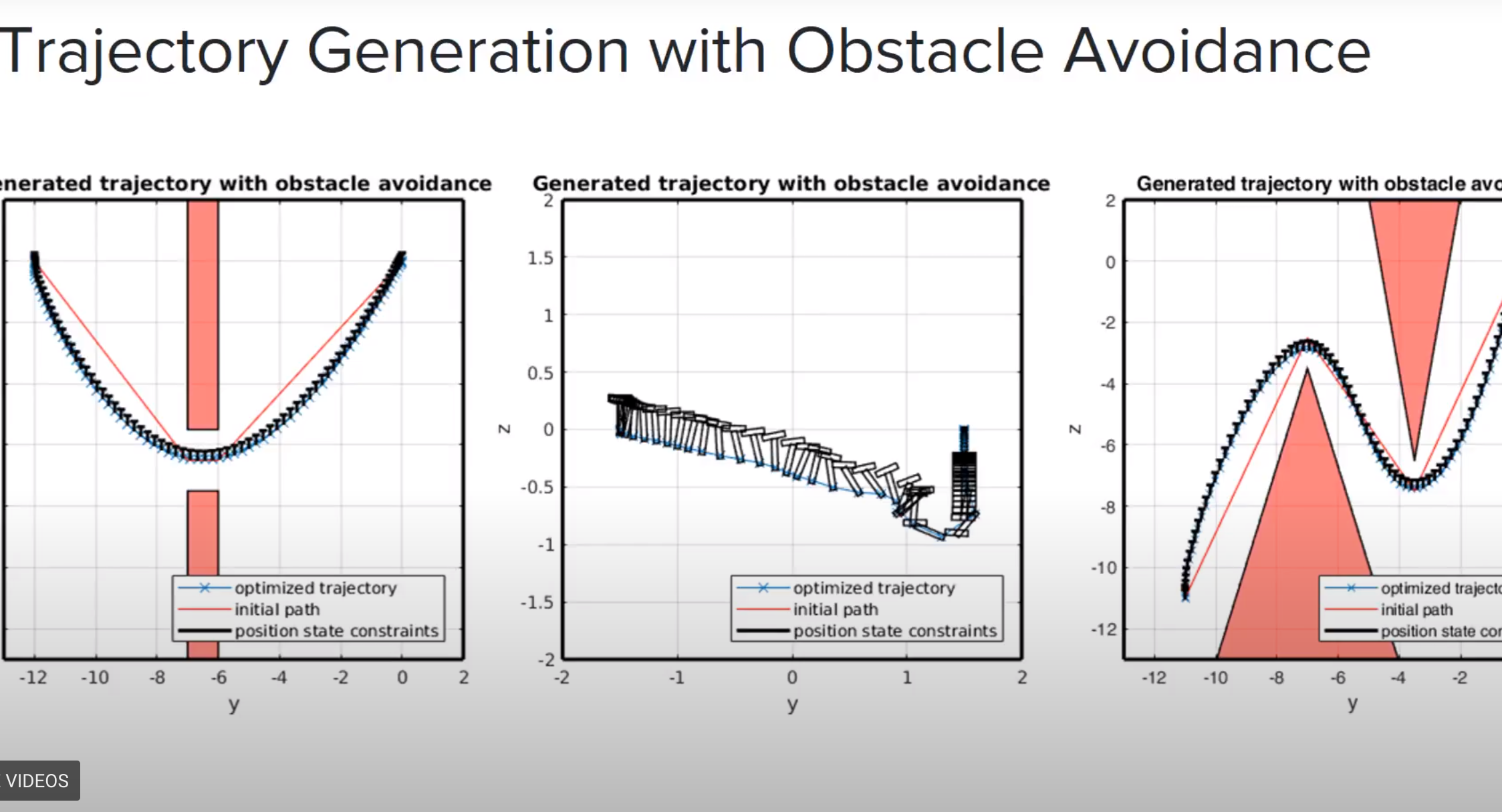
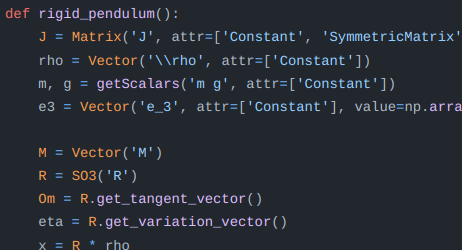
Obstacle Avoidance for 2D Quadrotor with Hanging Load
Optimization-based collision avoidance trajectory are generated for 2D quadrotor with hanging load. A Model Predictive Control (MPC) framework is used to track these trajectory.
[continue reading…]
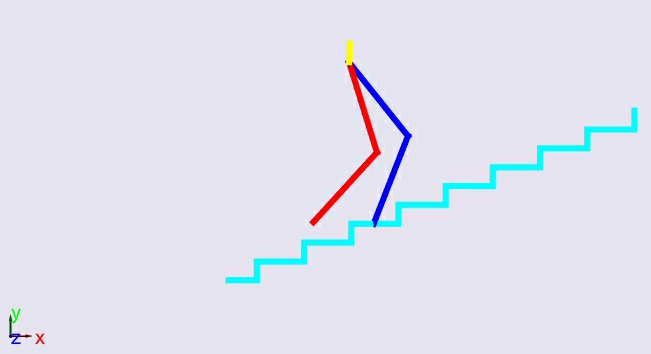
Stair climbing using virtual model control for 2D bipedal locomotion
Virutal model control from [Pratt, Jerry, et al] is used to achieve stair climbing of a 5-link planar humanoid model in SimMechanics.
[continue reading…]
Contact
Hybrid Robotics
Dept. of Mechanical Engineering
University of California, Berkeley
Berkeley, CA - 94720
Email: prasanth dot kotaru at berkeley dot edu