
Dissertation
Dynamics and Control for Collaborative Aerial Manipulation
Abstract Aerial vehicles for physical interactions as a form of a freely-floating manipulator are of growing interest in recent times. Aerial vehicles like quadrotors enable us to address issues such as last-mile delivery and search & rescue. Using multiple such vehicles collaboratively increases the scope of manipulation beyond what a single vehicle can achieve. This dissertation presents theoretical and experimental contributions toward using multiple quadrotors for collaborative tasks, with an emphasis on cable-suspended payloads.
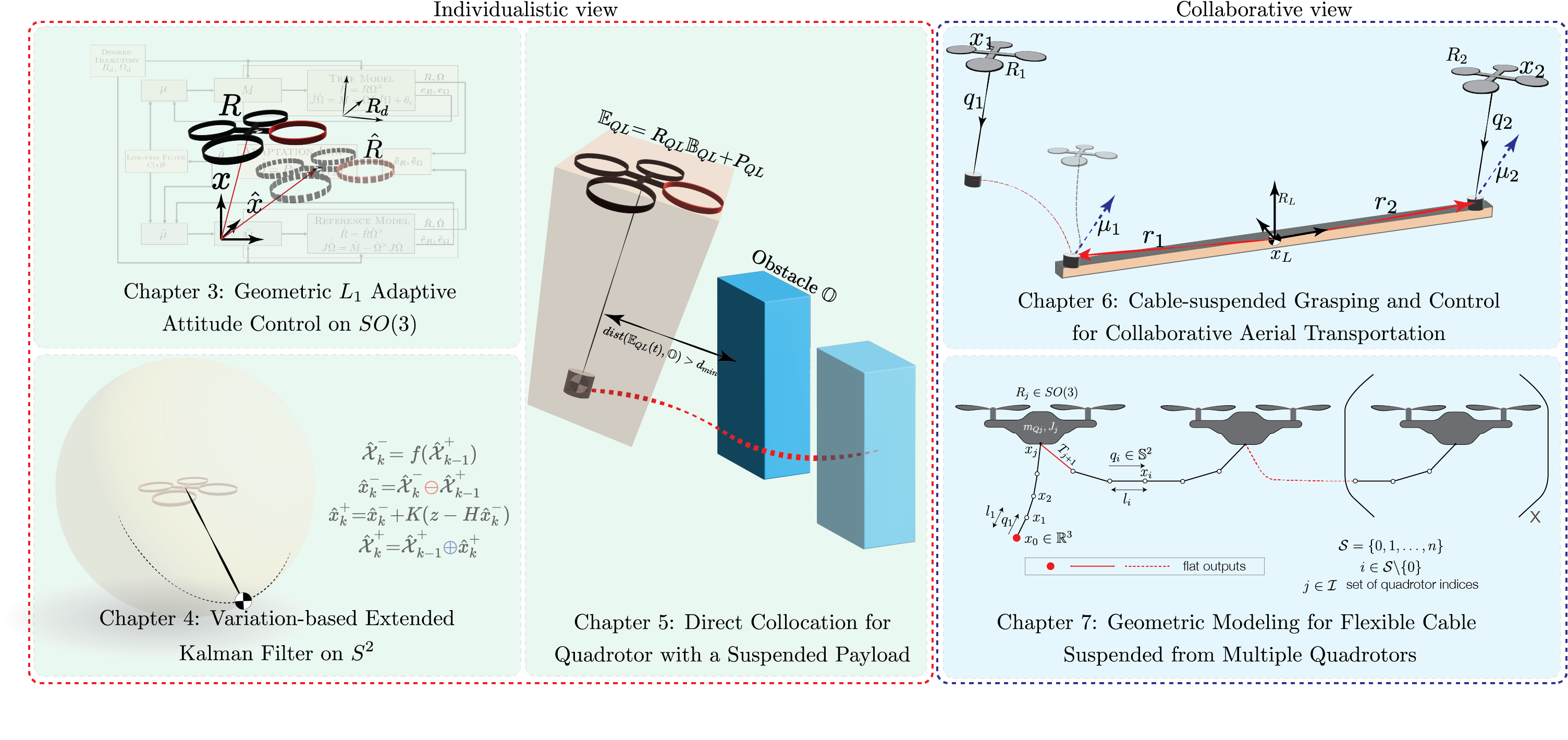
The dissertation studies the problem of collaborative aerial manipulation from two overarching views. The first half of the dissertation has an “individualistic view” and presents methods and algorithms for a single quadrotor/quadrotor with a cable-suspended payload. An L1 adaptation scheme is implemented on a geometric attitude control for the quadrotor on \(SO(3)\) in the presence of model uncertainties and disturbances. Next, the extended Kalman filter is modified to estimate states on \(S^2\). The concept of variation on manifolds is employed to linearize the system states and compute the variations in the state. Optimal and obstacle-free trajectories for a quadrotor with a suspended payload are generated using direct collocation. The planning method exploits the differential flatness for generating the trajectories in the flat space and converts non-differentiable obstacle avoidance constraints into smooth constraints using dual variables.
The second part of the dissertation has a “collaborative view” and presents results for two types of aerial manipulation, multiple quadrotors carrying a payload using suspended cables (parallel-aerial-manipulator) and a series of quadrotors connected using a flexible cable (serial-aerial-manipulator). The dissertation presents experimental results for grasping and controlling payload using a cable-suspended gripper using more than one quadrotor. Finally, the dissertation models and computes coordinate-free geometric dynamics for multiple quadrotors connected in series using a single flexible cable and shows that the system is differentially-flat.
3. Geometric \(L_1\) Adaptive Attitude Control on \(SO(3)\)
Associated Paper: Geometric \(L_1\) Adaptive Attitude Control for a Quadrotor Unmanned Aerial Vehicle Prasanth Kotaru, Ryan Edmonson, Koushil Sreenath. ASME Journal of Dynamic Systems, Measurement, and Control, 142(3), March 2020
Video:
4. Variation-based Extended Kalman Filter on \(S^2\)
Associated Paper: Variation Based Extended Kalman Filter on \(S^2\) Prasanth Kotaru, Koushil Sreenath European Control Conference (ECC), pages 875–882, Naples, Italy, June 2019
5. Direct Collocation for Quadrotor with a Suspended Payload
Associated Paper: Differential Flatness based Path Planning with Direct Collocation on Hybrid Modes for a Quadrotor with a Cable-Suspended Payload, Jun Zeng, Prasanth Kotaru, Mark Mueller, and Koushil Sreenath IEEE Robotics and Automation Letters (RA-L), 5(2):3074–3081, February 2020
Video:
6. Cable-suspended Grasping and Control for Collaborative Aerial Transportation
Associated Paper: In-the-works
Implementation: Work-in-progress
Video:
7. Geometric Modeling for Flexible Cable Suspended from Multiple Quadrotors
Associated Paper: Multiple quadrotors carrying a flexible hose: dynamics, differential flatness and control Prasanth Kotaru, Koushil Sreenath International Federation of Automatic Control World Congress (IFAC), July 2020
MATLAB Implementation: https:github.com/HybridRobotics/multiple-quadrotor-flexible-hose
Video: