
Prasanth Kotaru
Software Engineer, Motion Control, Waymo LLC
Education
Ph.D., Mechanical Engineering, University of California, Berkeley, CA, 2022
Dissertation: Dynamics and Control for Collaborative Aerial Manipulation
M.S., Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA, 2017
B.Tech., Mechanical Engineering, Indian Institute of Technology, Madras, India, 2014
Research Interests
I specialize in developing control and estimation algorithms for autonomous systems, with expertise spanning autonomous vehicles, robotics, and multi-agent systems. My work combines classical control theory with modern machine learning and AI techniques to build robust, scalable solutions. Currently, I focus on creating fleet-wide control tools, state observers, and detection systems that enhance safety and performance across entire autonomous vehicle fleets. Previously, I researched nonlinear control strategies and collaborative systems for aerial robotics, developing methods for safe multi-robot coordination and manipulation.
Autonomous Vehicle Control
Fleet-wide control systems, state estimation, and ML/AI-driven safety tools for autonomous driving.
Multi-Aerial Collaborative Manipulation
Nonlinear control and coordination algorithms for safe multi-robot aerial systems and payload transport.
Publications
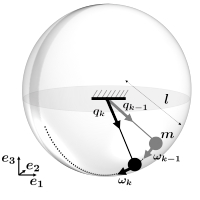
Variation Based Extended Kalman Filter on S²
Prasanth Kotaru, Koushil Sreenath
European Control Conference (ECC)
Geometric Control and Differential Flatness of a Quadrotor UAV with Load Suspended from a Pulley
Jun Zeng, Prasanth Kotaru, Koushil Sreenath
American Control Conference (ACC)
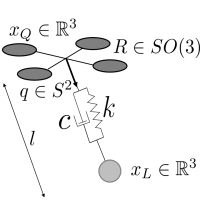
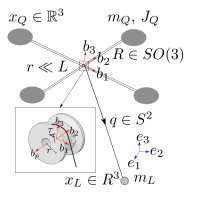
Dynamics and Control of a Quadrotor with a Payload Suspended through an Elastic Cable
Prasanth Kotaru, Guofan Wu, Koushil Sreenath
American Control Conference (ACC)